ARM approach

Hi.
Questions about ARM approach in NAV page in FMS.
If i choose ILS or RNAV sometimes ARM approach appear and sometimes not.
why sometime not and sometimes appear ?
Is it very important to ARM approach ?
what usefulness ARM approach ?
Comments
ARM APPR prepares the FMS for the approach and checks the requirements. In this way (real) NAV sensors are checked that are required for the selected approach (ILS, VOR, GPS, ...). In the case of a GNSS approach, Receiver Autonomous Integrity Monitoring (RAIM) is also carried out. This has definitely not yet been implemented here, and I haven't yet noticed whether the other plays a role. What is also changed with ACT APPR, the CDI Scale sensitivity changed to +/- 1.0 NM.
If the required navigation aids ILS, LOC, VOR, NDB are not locked, the FMS with TUNE APPR offers to set them automatically.
If the pilot does not activate the whole thing, which is only possible from 50 NM from the airport anyway, the whole thing is automatically activated later, at 30 NM from the airport. At the beginning the whole thing is based on the sequence ARM APPR - TUNE APPR - ACT APPR - MISSD APPR.
Hi.
If don't arm approach,is arm approach will be activate it's self ?
If i must to arm approach when must i arm approach and how far of the destination airport ?
Because i arm approach when arm app appear in nav page of fms about 50 nm of the airport .
And constraint altitude appear for somes waypoints and i have problem for vnav descent.
For exemple for star Habbs5 for CYUL runway 28 .wapoint habbs i must to be 16000 or below and next waypoint comau no constraint but when arm approach 16000 feet appear for comau waypoint and there is 7 nm for tovat 9000 so i must to descent about 5000 feet min.
If you always write on the same topic in several threads, it is difficult to answer. So if you do not start ARM APPR yourself (although only preparations such as checking the required sensors, scaling are started here), the airport will start this automatically at 30 NM.
A problem that has already been discussed in another thread (LOWI RNAV Approach), the Majestics automatically inserts the most recently flown over restriction in a VNAV profile for waypoints without height restrictions. As a result, it is virtually impossible for the Dash to predict and correctly calculate and fly a VNAV profile beyond a "free waypoint". If all waypoints of a STAR / transition have a restriction, there are no problems. Only when a new restriction becomes effective will the NAV profile reassess it and, of course, exit if the path is not easy. This leads to the fact that here, which is also normal in real life, you sink using VS. In real life, you mostly get heights released that do not match the VNAV profile. VNAV cannot be compared with Boeing's anyway. So if the more rudimentary VNAV of the Dash cannot do it in full, you have to go down using VS and still like to orientate yourself on the charts (in the USA and certainly Canada there are these ATC instructions often to fly and go exactly according to the charts ). But I had already written that several times.
The Dash requires that you record this peculiarity within the approach briefing in a comparison of charts / FMS and derive the use of VS from this in advance. In reality one would switch from VNAV to VS at some point anyway in order to be able to (have to) react to ATC instructions. First I fly the final approach (you fly) then again with VNAV.
@FraPre you are absolutely right that it should be done in VS.
Something else to note is that ATC knows the aircrafts performances and are never going to ask an aircraft to do something impossible. In doubt, ATC would ask you if you can do it, like to cross a WP at a certain time or at a certain altitude.
If we take this HABBS5 STAR and if you cross HABBS at the upper limit of 16000' and must cross TOVAT at 9000' if you have a GS of 240 Kt it takes 6.25 minutes to loose 7000', about 1200 Ft/mn, same for RUDSU 4000'. If you have a GS of 300 Kt you take a VS of 1400 Ft/mn, less than a 3° angle, so no problem on this approach.
But perhaps if I use VTO to set vnav for next constraint altitude when there is a next waypoint with no constraint altitude.
Because I don't want always to calcul VS to descent to next constraint.
May I suggest some YouTube videos for some folks that have good content e.g. "capt Nabs" or the Airline2Sim Q400 series.
But you can also make it more difficult than it is. My VS selected on the VNAV page is -1800. I think if you work manually with VS, you can work very comfortably with a VS between -1500 and -1000. Always keep an eye on the whole thing and adjust it if necessary in order to comply with a possible restriction. If you sink according to ATC information, you should be able to cope with -1000 ft, as you are only given a certain altitude, but usually no waypoint in connection with it.
can you look my video and say me my mistakes and why i get pitch hold.
CYUL to CYQB star pesac4 runway RNAV 24
Unfortunately you have to do a bit of calculations as the computer cannot replace the human brain.
On your video we can see that you have a GS of about 340 Kt. We know that there are 26 Nm between GONUM and PIKVO and you have to loose 11000 Ft in about 4'30" which would give a VS of nearly 2500 Ft/mn. As explained before, nothing stops you to ask ATC to start your descent before and to aim for PIKVO 5000'.
On your video 14'17" you were at VS 1400 Ft/mn so when the aircraft computer find that the VS should be about 2100 Ft/mn it would go to PITCH HOLD as it does not understand what's going on.
When you went to VS you change all the time from 2300 to 1800 and to 2100 which is not good and the passengers (if any) would not like too much the roller coaster effect.
Then you tried to go back to VNAV and there was no need to.
23'20 KABVI to BIFTI it should have been OK on VNAV but sometimes it goes PITCH HOLD and in this particular situation I did not see why.
It is quite known that the VNAV on the Q400 is not the best and a good bit of pilots would use the VS and @FraPre explained it on his above post.
Anyway, you reacted correctly in going to VS at KAVBI but you should have left ALT 4000' and select ALT SEL and not 2500' and trying to re-engage the VNAV as you did few times as you can see at 24'28" you were below 4000' and you'll have to climb which is not good at all.
After you tried few times to go VNAV again but it was too late and you forgot the basics on concentrated on the FMS: ldg gear a bit late and so flaps 15.
Something else, which has nothing to do directly with the FMS: the HDG bug should follow the HDG all the time so if you have to take a new HDG given by ATC you just press HDG or if suddenly the FMS does not work anymore or to intercept an ILS.
As well you should adjust the rudder trim when you change the power to keep your wings level.
Flaps 5 was a bit too early unless ATC would ask you to reduce the speed to 190 kt as you were over 30 Nm from touchdown.
The Mandatory ALT from PIKVO has been automatically transferred to the 2 following waypoints, as these have not noted any restrictions.
The path was correct up to KAVBI, since both navigation points had also noted the 5000 ft. With active navigation point BIVTI (and only now) the VNAV control received new information, namely the 4000 ft from BIVTI. Although you have flown correctly at 5000 ft, a VDEF of -734 ft is currently calculated, i.e. the aircraft thinks it is too high and disengages from VNAV. I am also assuming that the -1500 ft specification that can be seen has been included in the calculation, since we only have to reduce a distance of 4 NM and 1000 ft. VNAV would certainly have started to sink at about 2 NM at 1500 ft, had VNAV not ended. The reasons why VNAV disconnected can be found in the manual (Smartcockpit)
I still have an appointment now, but I will watch the video carefully afterwards. The previous speaker has already given a lot of tips.
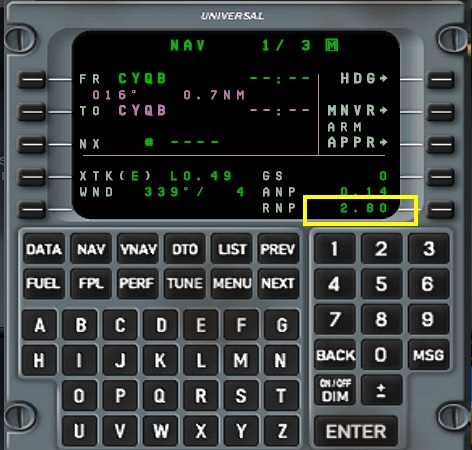
To switch from VNAV to VS @jpgmultimodal had written something. I would have been interested in what would have happened if you had stuck with GONUM VNAV. Since it is an AT or BELOW restriction, this has not been carried over to LOMSO. A higher VS from VNAV would be required, but I suspect that this would have settled. About the rest I had already written something, which I noticed, you have certainly not set the RNP to 0.30, a DH (based on the radar altimeter) is only selected for ILS CAT II / III, here the DA would be 557 (based on barometric altitude) has been correct. The approach is based on a VDA of 3.10 ° and starts in the Intecept at 4000 ft. The final descend then begins at 4.5 NM before ULBOM. At the latest the minimum 4000 ft to BIVTI and further to the IF IKDEB I would have flown constantly with VS, and all heights are always secured with SEL for the IF / FACT (Final Approach Capture Fix), otherwise you will unintentionally go deeper! Once the IF IKDEB has been passed, the final approach becomes effective (visible in the PFD), and gearmed is then carried out in good time, taking into account the current VDEF, before ULBOM VNAV. The perpetual switch from VNAV to VS and back is no good. You set the CL to MAX very early on (why not with RDC NP LDG, by the way?)
2 things i don t understand :
1:not set the RNP to 0.30, a DH (based on the radar altimeter) is only selected for ILS CAT II / III, here the DA would be 557 (based on barometric altitude) has been correct. The approach is based on a VDA of 3.10 ° and starts in the Intecept at 4000 ft.
2:why not with RDC NP LDG, by the way?
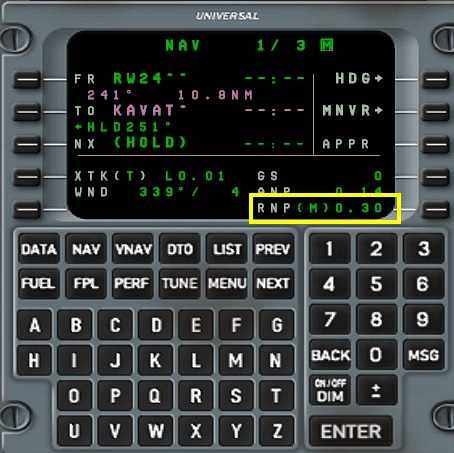
As @FraPre said set the RNP to 0.30 instead of the 2.80. I am not sure if on our modelled Q400 it changes something but it is the procedure.
You use DH for ILS (may be for the LPV as well but as we are not equipped yet so I don't know) and DA for the NON precision approaches

Regarding RDC NP LDG: the Q400 (Q is for QUIET) so on final, for the good people living below, you do this (Flybe):
can you check my last video ?
always same issue .PITCH HOLD after each waypoint of RNAV descent.
CYQB RUNWAY 24
After passing GONUM you activate VTO to pos. 3. Up to this moment it was PIKVO with a restriction of 5000 ft. After the overflight and at the moment of your ENTER, SAVIN changes to pos. 3, which has no height restriction, so none VNAV. Also displayed as the reason on the VTO page (NO VWPT ALT). Minute 8:26
In the final you activated VNAV too early, you shouldn't have set a lower height for the final approach. Intercept would be in ALT with 4000 ft, then on the final you can armed VNAV, the path is first cut 4.5 NM before ULBOM, you almost sink too early.
https://nbaa.org/wp-content/uploads/2018/11/CYQB-RNP-AR-project-Customer-briefing_V1.pdf
I didn't have time to watch the whole 30 minutes (which is always quite long) in detail. Unfortunately, it's bedtime again here. I noticed the two points in the fast forward run.
Ok thank you it's ok now.
Was vnav activate too early.
I observed TOD on the ND just before Ulbom .
I did fly second time and TOD not appear but descent perfect.
Is it supposed TOD appear each time ?
Second question about rudder trim.
Is the rudder trim must to be center before to land ?
Because when I approach of the runway plane not center.
Is there a way to put center quickly?
I must to descent 2300 feet min .
I must use VS.
I engage vnav and not descent.
As far as I know, TOD is only displayed if VNAV is programmed accordingly, i.e. VNAV Page, select relevant navigation point (not with VTO). The TOD now appears and marks the starting point for the calculated sink profile. If in the meantime you fly back to level off and hold a certain altitude (VNAV PATH) and, if necessary, carry out new programming, vml. also a new TOD appear. Otherwise VNAV remains active in the background, recognizable by the vertical deviation scale and the VNAV PATH mode in the FMA. If you approach an imaginary TOD again (not displayed), the vertical waypoint alarm comes and the further descent starts, provided you have lowered the altitude on the MCP. Only in the final approach you do not have to lower the height, because the approach is stored as an approach plan with the vertical profile in the FMS. So if you turn into the final with the 4000 ft ALT SEL, the Approach FMS will be activated on the side if you have not done it manually on the NAV page beforehand. Theoretically, you get the approval for the final approach, only then would I be poor as I approach the 4.5 NM ULBOM VNAV in order to now also follow the final approach vertically. Up to this point you will fly at 4000 ft, but you will always sink earlier.
In your example you will not be able to sink with VNAV because you are around 800 ft too deep (VDEF display on the VNAV page). This is probably due to the fact that the 16,000 ft restriction from GONUM had also been transferred to LOMSO, which has no restriction itself. Overall, I wouldn't "play" with VNAV that much. The Dash has a rather simple VNAV. The first descent to the 16000 at GONUM o.k., then simply continue with VS and ALT SEL on the 5000/4000 up to 5 NM before ULBOM, then again poor VNAV for the final approach.
The rudders do not have to be centered for the final approach. If the worst comes to the worst, you take the pressure off the yoke with the trim. But when the aircraft reacts on the ground via the Noose Wheel and the rudders, you have to remember that you have trimmed more or less heavily. The P factor may also be added to a different extent
again pitch hold.Now
my VNAV was ok.
I did many other rnav approach and no issue.
Yesterday I tried and no problem.this morning i tried again and pith hold.
But you've really picked out a nice approach! In principle everything fits. The point 4.5 NM lies between the IF IKDEB and ULBOM, which is probably the FAF, and is marked purely by a distance on the charts. Due to the flight guidance with the 90 ° turn, the aircraft starts on the final approach course well before IKDEB and the FMS activates the approach automatically thanks to the new inbound waypoint ULBOM. Up to this point only one thing doesn't fit. An NPA is always flown stabilized, i.e. fully configured for the landing (Vapp, Landing Flaps, Gear down), so that on the one hand you can concentrate on the final approach, on the other hand the path is flown at a constant speed and you don't like that often has to touch up.
To get back to your video, the 3.10 ° path is indeed captured at around 4.5 NM, although the VNAV of the Dash here is definitely based exclusively on the ULBOM waypoint at 2500 ft, which is reached reasonably well. But that is not the actual final approach, which, as you can see on the map, only begins with ULBOM. Shortly before ULBOM, the Dash switches back to Pitch HOLD. Theoretically, this is intentional and always occurs if VNAV was already active when Approach was activated. It is supposed to prevent the aircraft from sinking. You simply activate VNAV again, as you did and the Dash begins at the FAF (here actually ULBOM) with the Descend. But since you flew through the FMS with ALT during Approach activation, that shouldn't have happened. With a constant descend without further intermediate points between FAF and Rwy, the Dash also works quite properly and consistently.
Unfortunately there is another intermediate point here (KISIK). Here the Dash doesn't really cope again, switches back to PITCH HOLD before KISIK. The reason is, she has calculated that we can still fly a bit in level flight, sees us below the vertical profile (good to see on the deviation bar). 2 NM before KISIK, the VNAV activated by you again becomes active and plunges us at -1800 ft to KISIK, only to reduce the VS again as we approach, but ultimately to get out completely. From my point of view it is no longer up to you, rather the Dash and the circumstances of the final approach (intermediate waypoint)
I have to fly the approach myself.
look here no problem.same approach